Программирование Фрезерной Обработки На Станках С Чпу
Программирование фрезерной обработки на станках с чпу — это важнейшая часть технологического обеспечения на современных предприятиях, заключающаяся в задании взаимосвязанной последовательности команд, представляющих закодированный алгоритм движения рабочих органов фрезерного станка, режущего инструмента и заготовки. Наиболее распространенным международным стандартизированным буквенно-цифровым кодом остается ISO 7 bit. Передовые СЧПУ поддерживают как стандартный код, так и фирменные диалоговые языки.
Наряду с операциями, которые включает в себя технология обработки отверстий на станке с чпу, на обрабатывающем центре выполняются операции фрезерования. Программирование фрезерной обработки поверхностей дисковыми и торцовыми фрезами не вызывает каких-либо затруднений. Программирование обработки контуров концевыми фрезами имеет ряд особенностей.
Компенсация радиуса инструмента (G41-G42-G40) при программировании
Рассмотрим следующую ситуацию: допустим необходимо выполнить фрезерование контура детали, представленной на рис. 1. Для обработки принимаем цилиндрическую концевую фрезу Ø16 мм. У вращающегося инструмента обычно точка привязки расположена на оси вращения (рис. 1).

Рис. 1. Программирование траектории перемещения инструмента при обработке контура
В таком случае траектория перемещения инструмента – это траектория перемещения точки, лежащей на оси его вращения. Очевидно, что такая траектория будет повторять контур детали и лежать на постоянном удалении от детали равном радиусу инструмента. Траектория, лежащая на равном расстоянии от контура детали, называется эквидистантой.
Выполним программирование фрезерной обработки и запишем управляющую программу для представленной детали:
N1 T1.1 M6
N2 S1100 F95 M13
N3 X-24 Y4 Z-3
N4 G3 X-8 Y20 R16
N5 ;осуществляем плавное врезание инструмента на глубину припуска
N6 G1 Y148
N7 X70
N8 G2 X148 Y70 R78
N9 G1 Y-8
N10 X-8
N11 Y22
N12 G3 X-24 Y38 R16
N13 G X-20 Y-25 Z50
N14 M30
Представим следующую ситуацию: допустим на текущий момент нет фрез Ø16 мм, а есть фрезы Ø18 мм, следовательно, данная программа уже становится непригодной для обработки. В такой ситуации приходится разрабатывать новую траекторию перемещения инструмента, рассчитывать новые опорные точки, проводить корректировку кадров управляющей программы. Данный недостаток значительно снизил бы эффективность использования станков с ЧПУ. Как видно из представленного примера, при изменении размеров инструмента траектория перемещений не меняется, меняются лишь координаты опорных точек в зависимости от текущего диаметра инструмента. С данной задачей легко справляется система ЧПУ при использовании подготовительных функций компенсации размеров инструмента (G41, G42):
- G41 — включение компенсации, инструмент слева от заготовки;
- G42 — включение компенсации, инструмент справа от заготовки;
- G40 — отмена компенсации.
Особенностью использования компенсации инструмента на рассматриваемой системе ЧПУ является то, что при программировании траектории перемещений условно принимается диаметр инструмента, равный нулю. Траектория инструмента совпадает с обрабатываемым контуром и в программе фактически описывается обрабатываемый контур.
Какую из двух функций использовать определить очень просто — достаточно посмотреть на инструмент в направлении его перемещения (если инструмент находится слева от детали – G41, справа – G42).
До программирования компенсации радиуса инструмента необходимо определить плоскость интерполяции. Как известно, плоскость интерполяции может быть определена при помощи G17 (устанавливается при включении устройства), G18, G19.
Инструмент должен позиционироваться к стартовой точке на профиле при помощи линейной интерполяции. Однако первый элемент (кадр) профиля может быть как линейным, так и круговым.
Для отмены компенсации радиуса инструмента необходимо запрограммировать функцию G40.
Действие функций G41, G42 прекращается в первом же кадре движения после кадра с функцией G40.
При программировании профиля фрезерной обработки на станках с чпу с компенсацией радиуса инструмента следует помнить, что:
- первое перемещение должно быть линейным, т. е. на быстром ходу или при скорости обработки (G00- G01);
- блоки с функциями M, S и T не могут программироваться внутри области кадров, на которую распространяется действие функций G41 и G 42;
- профиль может обрабатываться в непрерывном режиме (G27- G28) или в режиме «от точки к точке» (G29), в автоматическом или кадровом режиме;
- на первой и последней точке профиля центр инструмента позиционируется перпендикулярно профилю на программируемой точке.
Следовательно, траектория перемещений инструмента и управляющей программы примут вид (рис. 2):
N1 T1.1 M6
N2 S1100 F95 M13
N3 Z-3
N5 G41 X-16 Y4
N6 ;так как инструмент находится слева от контура используем G41
N7 G3 X0 Y20 R16
N8 G1 Y140
N9 X70
N10 G2 X140 Y70 R70
N11 G1 Y0
N12 X0
N13 Y22
N14 G40 G3 X-16 Y38 R16
N15 G X-20 Y-25 Z50
N16 M30

Рис. 2. Пример программирования траектории перемещения инструмента с использованием функции коррекции инструмента
Особенности программирования контуров при фрезерной обработке
При перемещении из точки 2 в точку 3 будет наблюдаться отрыв инструмента от обрабатываемой заготовки (рис. 3), а при последующем перемещении в точку 4 инструмент повторно осуществляет врезание на глубину припуска. При подобной обработке металла фрезерным станком, врезание осуществляется в жестком режиме. Все это приводит к снижению стойкости инструмента, а также, вследствие деформации инструмента и детали, к появлению «недорезов» на обрабатываемой поверхности (рис. 4).

Рис. 3. Отрыв и врезание инструмента при фрезеровании контура заготовки детали
Поэтому для всех участков траектории, где изменение направления движения инструмента превышает 180o, выполняют сопряжение контура (рис. 5). Сопряжение осуществляется путем перемещения инструмента по дуге окружности радиусом, равным радиусу инструмента, и центром, расположенным в точке излома контура.

Рис. 4. Схема формирования «недореза» на поверхности заготовки детали
Точки начала и конца дуги сопряжения определяются следующим образом: из точки излома контура строятся два перпендикуляра к сопрягаемым поверхностям, точки пересечения перпендикуляров и эквидистанты являются началом и концом дуги сопряжения.

При такой траектории перемещения инструмент постоянно касается детали, обеспечивая исключение появления «недорезов».
Система ЧПУ NC-201 (подробнее в статье “Структура систем чпу фрезерных станков”) позволяет автоматически выполнять скругления, сопряжения контура и скосы. Скругления выполняются программированием адреса r, скосы – b.
При программировании выпуклого пути перемещением против часовой стрелки радиус r, связывающий линии, должен иметь положительную величину; при перемещении по часовой стрелке программируется отрицательный радиус. Радиус r=0 выполняет сопряжение контура путем генерирования радиуса, равного нулю на детали.
Программирование фрезерной обработки на станках с чпу с выполнением сопряжений в этом случае примет вид:
N1 T1.1 M6
N2 S1100 F95 M13
N3 Z-3
N5 G41 X-16 Y4
N6 ;так как инструмент находится слева от контура, используем G41
N7 G3 X0 Y20 R16
N8 G1 Y140
N9 r0
N10 X70
N11 G2 X140 Y70 R70
N12 G1 Y0
N13 r0
N14 X0
N15 r0
N16 Y22
N17 G40 G3 X-16 Y38 R16
N18 G X-20 Y-25 Z50
N19 M30
Скос программируется как расстояние от точки пересечения между линиями (рис. 6).
Кодом UOV можно определить припуск в операциях контурной обработки. Заданный в программе или введенный с клавиатуры код UOV временно модифицирует значение корректировки на величину, равную установленному значению.
Пример: UOV=1,5 – при обработке будет оставлен припуск в 1,5 мм на сторону, при выполнении получистовой обработки.

Рис. 6. Пример программирования скоса (фаски) на поверхности заготовки
Программирование перемещений
Формат слова, задающего функцию перемещения, содержит адреса: X, Z, 1LK, знаки «+» или «-» и шесть десятичных цифр и имеет вид:
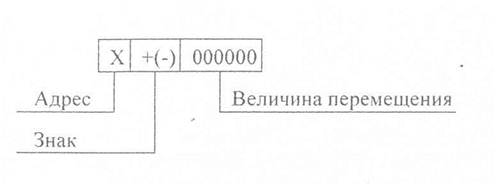
Способы задания величины инаправления перемещений определяются видом интерполяции на данном участке обработки.
6.5.7.Программирование перемещений при линейной интерполяции.
При линейной интерполяции в кадре УП можно запрограммировать только один отрезок прямой. В этом случае кадр будет включать подготовительную функцию (см. таблицу 1) и параметры перемещения по координатам X и Z.
При обработке цилиндрической поверхности перемещение осуществляется только по координате Z. При обработке торцевой поверхности — по координате X. При обработке конической поверхности перемещение инструмента осуществляется сразу по двум осям — Z и X.
Направление перемещения инструмента положительно (+), если движение осуществляется от шпинделя (по оси Z) или от оси вращения шпинделя (по оси X). Противоположные движения принято считать отрицательными (-).
Величина перемещения задается в импульсах (дискретах).
Один импульс по оси Z равен 0,01мм, а по оси X — 0,005мм.Способы задания величин перемещения в каждом случае зависят от выбранной системы координат (абсолютной или относи —
При работе в относительной системе координат (G26)по
адресам Z и X указывается величина перемещения, соответствующая приращениям Z иX на данном участке траектории.
При работе в абсолютной системе координат (G27) по адресам Z и X указывается величина перемещения,.соответствующая абсолютным координатам начальной точки в выбранной системе координат. Началом координат может быть «О» станка или «0» детали.
«0» станка — точка, принятая за начало отсчета в системе координат станка.
«0» детали — точка на заготовке, относительно которой заданы размеры заготовки.
6.5.9. Программирование перемещения инструмента в «0» детали.
Поскольку при составлении программы заранее неизвестно положение «0» станка, необходимо предусматривать возможность смещения нуля детали в процессе обработки конкретной детали. Под смещением нуля понимается перемещение инструмента из положения «0» станка в положение «0» детали. Смещение нуля осуществляется только в абсолютной системе координат (G27) при задании подготовительной функции (G5S). Подготовительную функцию G58 нельзя задавать в одном кадре с коррекцией инструмента (адрес L), так как смещение нуля представляет собой один из видов коррекции — коррекцию нулевой точки станка. Переход из «0» станка в «0» детали всегда осуществляется в отрицательных направлениях по обеим координатам (Z и X). Величина изнак смещения нуля определяются оператором при наладке станка на обработку конкретной детали и набираются на декадных переключателях «Смещение 0z «и «Смещение 0х» на пульте УЧПУ станка. Поэтому для смещения нуля нужно задать функцию G58 и Х+000000, Z+000000. Смещение нуля отрабатывается со знаком, обратным набранному на соответствующем декадном переключателе.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями: